长沙科瑞德电气有限公司
CHANGSHA CREDIBLE ELECTRIC . , LTD.
长沙科瑞德电气有限公司
CHANGSHA CREDIBLE ELECTRIC . , LTD.



15年专注矿山
15年从事矿山领域数字化系统研发、制造、施工服务的高新技术企业
数字化技术和产品中
开发出一系列数字化矿山产品并广泛应用于
矿山企业,获得的用户的一致认可
专业科研团队
公司研发团队与湖南大学丶长沙矿山院等科研单位就矿山数字化技术研发及应用长期合作
专业售后
以卓越的品质和良好的服务,为国内矿山企业提供专业的产品和快速响应售后服务
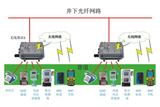
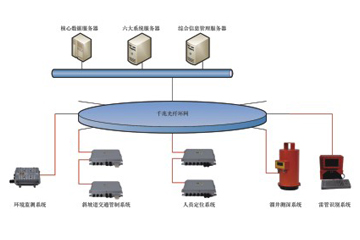 KT206R-矿山井下综合信息管理软件是公司开发的井下人员定位,监测监控系统综合信息管理平台产品 |
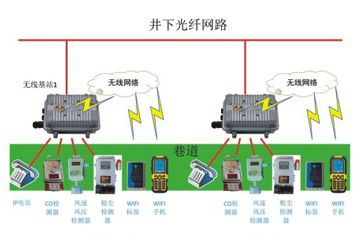 通过在井下安装若干无线基站,实现井下WIFI无线覆盖的同时,实现人员定位,通讯联络和监测监控 |
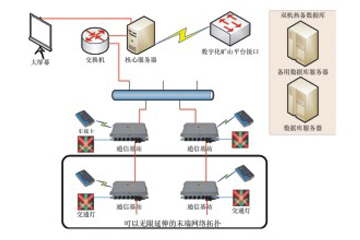 WTCS“井下无轨车辆调度系统”适用于矿井各种无轨车辆管理;系统通过输入矿山电子地图,可以精准定位井下各车辆实时位置 |
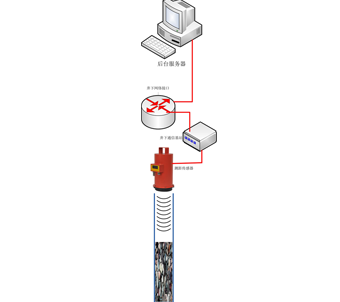 公司自主研发的CRD-R系列井深测量装置采用微波窄束测距技术,通过计算机软件对回波时长和角度分析处理.角度分析处理,对溜井矿料进行精准测量 |
 尾矿库在线监测系统通过对内,外部坝体位移(分别监测水平及垂直位移)浸润线,库水位干滩长度,安全超高降雨量库区影响进行分析 |
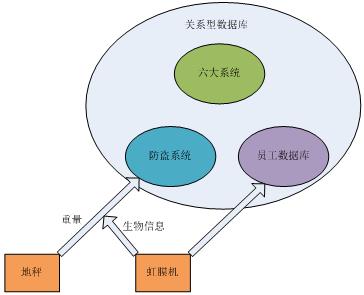 一种基于大数据分析矿山防盗预警系统,采集多个平台的数据,为分析计算提供数据基础。建立预测模型,通过滚动优化、反馈校正,实现防盗预警 |
专业从事矿山领域数字化系统研发、制造、施工服务的高新技术企业,自主研发了矿山数字化综合信息管理平台、矿山安全六大系统、斜坡道井下交通指挥调度系统、矿山井深测量等11个系列产品。
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
 2020年11月14日,长沙科瑞德电气发往西藏雪域高原的矿山安全“六大系统”的设备即将启程发往西藏拉萨林周县,这批设备将在海拔4000米的恶劣条件下经受严酷环境的考验,为西藏矿山开发和矿山安全生产提供保障,这是公司产品首次进入西藏地区,标志... |
 2020年7月15日,经过现场设备测试,长沙科瑞德电气有限公司矿山溜井测深系统完全达到设计要求并满足矿方需求,与湖北三鑫金铜股份有限公司一次性签订六套设备合同,为矿山数字化建设,掌握矿山中间矿石流量、运量、储量等实时数据,实现矿山溜井数字化... |
 长沙科瑞德电气有限公司开发的矿山溜井料位测量系统是解决矿山开采过程中采掘量计算的重要系统,科瑞德CRD-R系列装置采用微波窄束测距技术,利用电磁波对目标物体发送窄束无线信号的方式进行定位和测距,利用微波测距能满足矿山在灰尘多,湿度大、高浓度... |
 长沙科瑞德电气有限公司铜矿峪矿无轨斜坡道升级改造项目经过三个月紧张施工,项目竣工并进入试运行阶段。针对铜矿峪矿无轨斜坡道交通信号指挥系统要求、系统功能、控制室功能、线缆技术要求等各项要求。结合我公司多年项目实施经验制定中条铜矿裕矿斜坡道交通... |
 目前矿山六大系统井下人员定位系统使用的人员定位卡,常规的便携式人员定位卡多为挂带式,佩戴方式单一,难以适用不同人群的佩戴需求,人员定位卡的供电方式目前有一次性电池供电,电量消耗完之后进行更换,频繁的电池更改,增加了矿山企业的经济成本和人力成... |
 长沙科瑞德电气有限公司专注矿山自动化、数字化产品的研究与开发,开发的CRD-R系列矿山溜井微波窄束测深装置,掌握了电磁波在矿山特殊条件下的信号扑捉技术,提升测距精度、探测距离。经过不断的技术积累,历经三代技术升级,矿山溜井微波窄束测深装置成... |
研究成矿环境, 建立地质事件表 在开展地质矿产勘查工作前期, 相关工作人员应当根据当地地壳的演化运动特点来仔细研究成矿的地质环境, 并要建立相应的地质事件表, 通过科学合理的运用物、化、地、遥资料来深入研究成矿的地质环境, 特别要... |
随着中国工业化进程不断推进,对矿山资源的需求也随之增加,矿山安全作为能源安全的重要组成部分,对发展地区经济和保持社会稳定具有重要意义。由国家安监总局在2010年颁布了2010-168号文件《金属非金属地下矿山安全避险“六大系统”安装使用和监... |
 长沙科瑞德电气有限公司(http://www.crde.cn/)矿山建有完善的井下生产供水设施,井下管网已铺设到... |
 矿山六大系统小编对KT206R-H矿用一般型环网交换机产品的详细介绍 KT206R-H矿用环网交换机一款带3个千兆光端口、4个百兆光端口和3个10/100MRJ45电端口的管理型工业以太网交换机。3个千兆光端口为SFP插槽设计,... |
 一、当矿井困难发生时,可以在许多情况下实现应急救援,确定相关的救援系统,及时及时了解矿山六大系统井下人员的情况,达... |
黄沙坪矿业分公司的井下人员定位、监测监控及通信联络系统“三大系统”自2012年建成投入使用至今年已经成功运行五年有余。由于整个系统一直在井下处于温度高、湿度大、粉尘多的恶劣环境中运行,逐年积累了很多损伤,如:线路及设备老化、环网中断、UPS... |
2020年7月15日,经过现场设备测试,长沙科瑞德电气有限公司矿山溜井测深系统完全达到设计要求并满足矿方需求,与湖北三鑫金铜股份有限公司一次性签订六套设备合同,为矿山数字化建设,掌握矿山中间矿石流量、运量、储量等实时数据,实现矿山溜井数字化...
今天是2019年7月的最后一天,眼见着还有12个小时就要指向8月1日,在新的一个月里,环保行业将有哪些政策和标准...
业务咨询: 刘工: 18942570910 (微信同号)
欧工: 15874105242(微信同号)
杨工: 15211170114(微信同号)
招商合作: 涂工: 13974821101(微信同号)
公司网站:www.crde.cn (点击链接进入)
www.crde.top(点击链接进入)
 |
|
|